
- December 14, 2023
- By Pablo Diego Rosell
- Artificial Intelligence, Social Science
Human-Autonomy Teaming (HAT) offers significant potential to enhance complex operations by combining the strengths of autonomous agents with human operators. This collaboration, particularly in high-stakes environments like Urban Search and Rescue (USAR), can enhance performance by reducing workload, improving decision-making, and facilitating information sharing. However, effective HAT requires overcoming substantial challenges, particularly in understanding and predicting the behaviors of both human and autonomous agents. The development of a Theory of Mind (ToM) in AI agents is crucial for anticipating human beliefs, biases, and strategies, ensuring effective communication and advice in time-critical and uncertain scenarios.
This post summarizes a recent article by Pablo Diego-Rosell for The Gallup Organization addressing Dynamic Strategy Selection under Bounded Rationality in Constrained Optimization Problems in the context of the DARPA-ASIST program, a 4-year project for the developmentof Artificial Social Intelligence for Successful Teams (ASIST). In its first study the ASIST program used a single-player urban search and rescue USAR scenario in a custom-built Minecraft testbed. The Gallup-ROSAN team developed an Individual Planning Model that would enable the AI teammate to better infer, predict and intervene towards improved individual performance.
The High-Stakes of USAR
In emergencies like USAR, where time, stress, and uncertainty are critical factors, human operators often rely on heuristic rules, which can lead to bias and suboptimal outcomes. To address this, AI agents need to develop an understanding of their human teammates’ boundedly-rational decision-making processes. The paper explores this through USAR experiments and cognitive modeling, focusing on the beliefs and behaviors driving operators’ strategic choices and satisficing tendencies, i.e., selecting adequate solutions over optimal ones under constraints.
Model Review
The study discusses two levels of modeling in HAT. At the task level, an optimal model describes the AI’s decision-aiding role, while a boundedly-rational model helps the AI develop a ToM, crucial for understanding human decision-making. The USAR scenario serves as a testbed for developing these models, considering heuristic decision-making and satisficing behaviors in human operators. DARPA’s ASIST program’s virtual USAR environment in Minecraft is used for this purpose.
Optimal Model of USAR
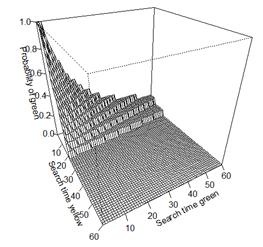
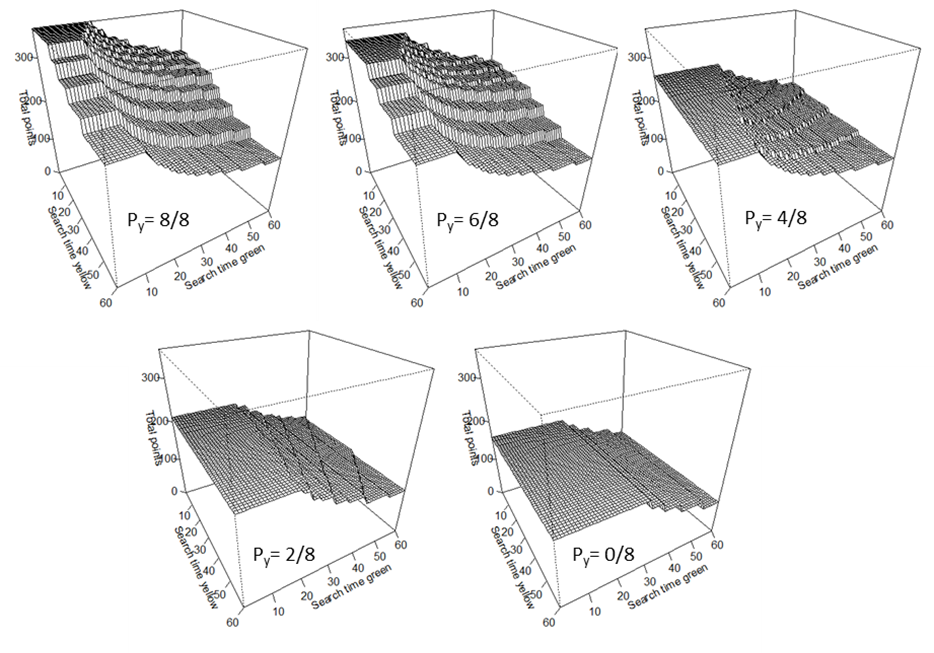
The paper details the optimal model of the USAR scenario, focusing on rescuing victims under time constraints. This model calculates the utility-maximizing plan, considering different victim types, rescue times, and benefits. The model’s mathematical formulation guides AI agents in devising and adjusting rescue strategies based on varying conditions and parameters. In summary, rescuers should first save all yellow and as many greens as possible, and then save the remaining greens.
Bounded Rational Model
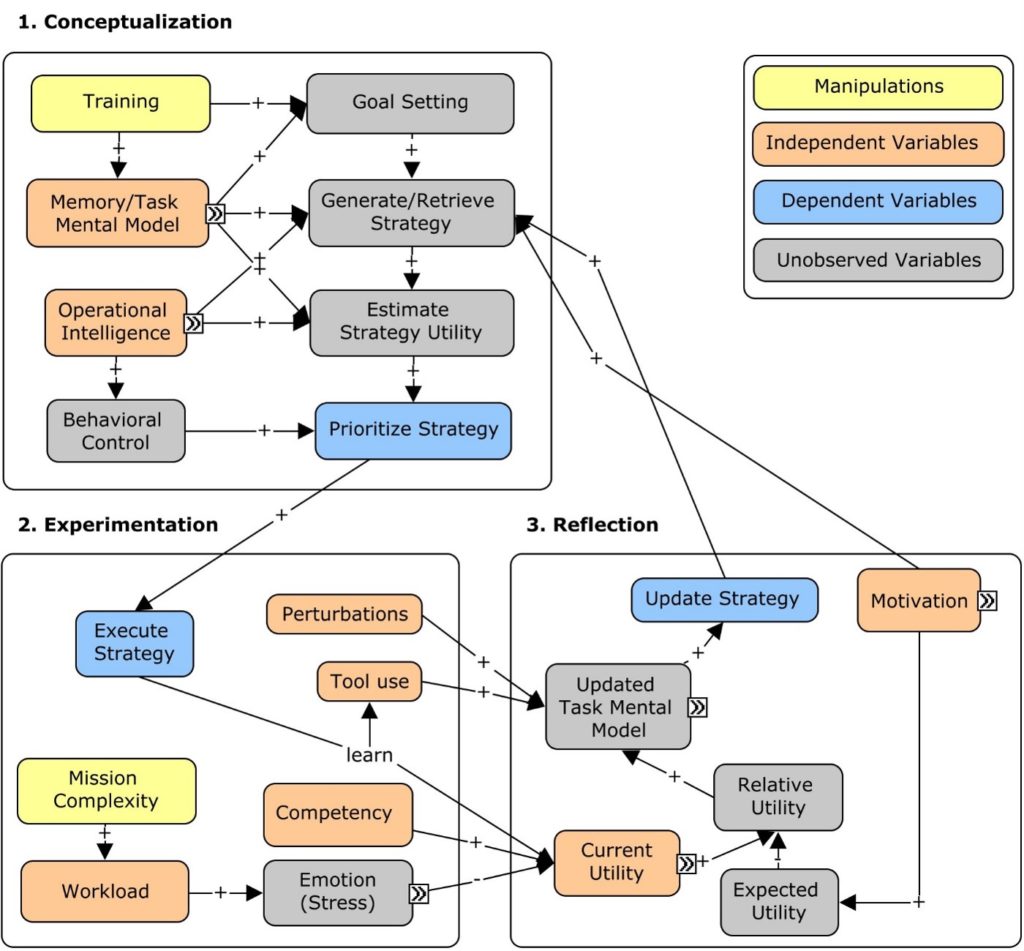
The USAR optimization problem presented above can be solved algorithmically or via computationally intensive simulations that require resources beyond human capabilities. We propose instead a Bounded Rational Architecture for Strategy Selection (BRASS) with three major stages: Conceptualization, Experimentation and Reflection. BRASS assumes that human operators select strategies based on a combination of heuristics and memorized experiences, which they experiment with and reflect upon. BRASS’s effectiveness hinges on its ability to learn from environmental cues and adapt strategies accordingly, incorporating individual differences in satisficing tendencies and competence.
Methodology and Results
The paper details the methodology of the USAR experiments, involving participants executing SAR missions in the Minecraft environment. The study tests several hypotheses related to strategy selection, learning, and performance, using Bayesian Generalized Linear Mixed Models for analysis. The results support many BRASS model predictions, highlighting the importance of experience, strategy performance, and individual differences in strategy selection and adaptation.
The findings affirm the potential of models like BRASS in understanding human strategy selection in complex tasks like USAR. The study reveals that optimal task models alone are insufficient for predicting human behavior in these contexts, emphasizing the need for models that understand human decision-making limitations. Future research should focus on enhancing external validity and exploring team-level models for strategy selection. The study underscores the necessity of both optimal and boundedly rational models for effective HAT in USAR and potentially other complex domains.
Full details can be found here.
About Rosan International
ROSAN is a technology company specialized in the development of Data Science and Artificial Intelligence solutions with the aim of solving the most challenging global projects. Contact us to discover how we can help you gain valuable insights from your data and optimize your processes.